这一章主要是讲全连接网络,优化器,初始化。
全连接网络
也叫MLP,多层感知器,之前章节里没有bias,这一章加上了
常说的网络参数
在考虑运算的时候,维度很重要,正确的写法是
因为如果
对于全连接网络,很重要的是如何挑选优化器和初始化权重,也就是接下来两点讨论的内容。
优化器
最终目标是找到让
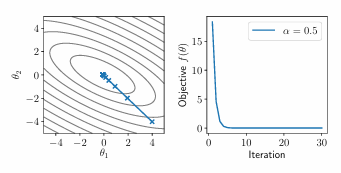
传统的梯度下降法采用不同的超参
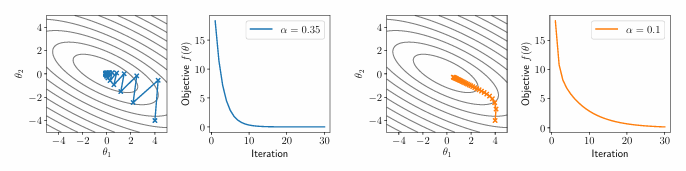
但是这样还得尝试不同的超参,我们目标是花费尽量少的时间找超参。因此出现了带动量的一些方法。
牛顿法
只作为了解,因为用得少。
牛顿法继承了更多的全局结构,加入了Hessian矩阵,即二阶导数矩阵,来调整梯度下降(放缩原梯度),在凸函数中逼近最低点,公式如下:
等效于使用二阶泰勒展开将函数近似为二次函数,然后求解最优解。如果
可以看出完全没有震荡,直接就是最低的方向。但是实际上不常用:
- 求二阶导效率太低,而且存储空间太大
- 对于非凸优化来说牛顿法似乎用不上
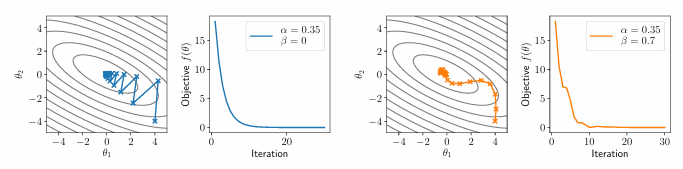
momentum(动量)
是一种更容易计算,但是也部分考虑了全局结构的方法,更常用一点。
更新的公式如下:
通过
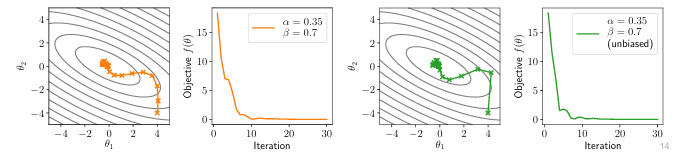
无偏动量
因为
加上去除偏差项(放缩项),让每次更新的步伐大致类似,公式如下:
可以看见每一次梯度更新都会平衡一些之前梯度的影响,放大本次梯度的作用。
Nesterov动量
原本的动量更新是使用本次的梯度,这个使用更新后下一个点的梯度来更新,其实数学原理我也不太懂,但是从结果上来看似乎更加平滑了。
对凸优化有用,有时候在深度网络中有用。
Adam
不同层之间的梯度尺度可能变化较大,因此提出的自适应梯度方法(adaptive gradient methods),它捕捉不同梯度间的尺度变化,调整梯度更新的比例。
这是最常用的方法,包含动量和自适应。更新公式如下:
这个方法包含两个动量,
随机抽样
以上都是说的整体,但是最重要的并且最可行的肯定是一小部分一小部分更新,即小样本计算梯度可得到有噪声但无偏的梯度估计,是重要的优化策略。
对比SGD:
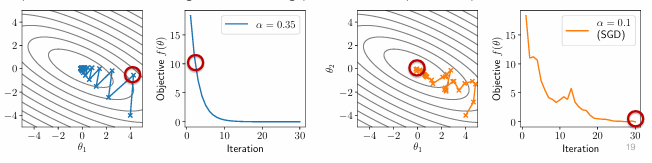
虽然有噪声,但是廉价,可用。
初始化
如何初始化参数?全取0吗?并不是,因为全0在深度学习中是鞍点。如果初始化为全0,那么梯度也会全0,因为激活函数会让所有值都是0
所以一个很关键的点时,选取初始化值很重要。
如果选择所有的梯度服从一个正态分布
norm是范数,其实就可以简单理解成大小我感觉
下图是在 MNIST 数据集上的示例,使用 n=100 个隐藏单元,网络深度为 50 ,激活函数为 ReLU
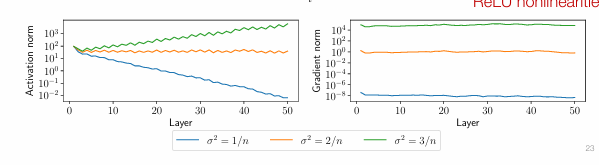
可以看到2/n的方差最好,因为每一次经过激活函数会有大概1/2的值被激活函数变为0,如果取方差是2/n就能保持稳定传播,n为隐藏单元的数量
如果使用 ReLU 非线性激活函数,
的 “一半” 分量会被设为 0 (因为 ReLU 函数对于负输入输出为 0 ) 。为了在使用 ReLU 后能得到和线性激活时相同的最终方差,需要将 的方差加倍,所以 ,这就是何凯明正态初始化(Kaiming normal initialization )的原理
第二个关键点,解释了为什么初始值很重要,实际上深度学习的训练过程会让权重变化没有那么大,相对而言最终权重离初始值更近,而不是每次都收敛到相似的区域

